
Première SI : Séquence 6
Analyser et modéliser la cinématique des systèmesLa cinématique est l’étude des mouvements de points ou de solides indéformables d’un système, indépendamment des causes à l’origine de ces mouvements. La liaison mécanique est un modèle cinématique utilisé pour décrire cette les possibilités de mouvement entre les solides.
Le torseur des actions mécaniques associé à ces liaisons permet de représenter de façon pratique les actions mécaniques. Le torseur cinématique permet quant à lui de représenter de façon pratique les comportements de translation et de rotation d’un solide : il décrit la cinématique du solide.
EX1: Exercices sur les liaisons cinématiques (correction)
EX2: Exercices sur les torseurs (correction)
EX3: Exercices sur les trajectoires (correction)
EX4: Exercices sur les mouvements de translation (correction)
EX5: Exercices sur les mouvements de rotation (correction)
EX6: Exercices sur les mouvements plan (correction)
EX7: Exercices sur les compositions de mouvements (correction)
 |
CH1 : Liaisons mécaniques et schéma cinématique (version professeur) – [synthèse]
|
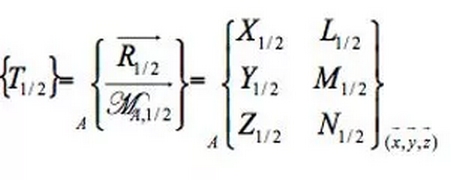 |
CH2 : Statique avec les torseurs d’actions mécaniques (version professeur) – [synthèse]
|
 |
CH3 : Généralités sur les trajectoires (version professeur)
|
 |
CH4 : Mouvements de translation (version professeur)
|
 |
CH5 : Mouvements de rotation (correction)
|
 |
CH6 : Mouvements plan (version professeur)
|
 |
CH7 : Compositions de mouvements (version professeur)
|
 |
TD1 : Ouvre portail FAAC (correction) L’objectif de ce TD est de réaliser le schéma cinématique de l’ouvre portail FAAC. (Prérequis : CH1) |
 |
TD2 : Camion benne (correction) L’objectif de ce TD est de déterminer graphiquement la vitesse de déplacement du vérin permettant la mise en rotation de la benne d’un camion à une vitesse spécifique. (Prérequis : CH3 à CH7) |
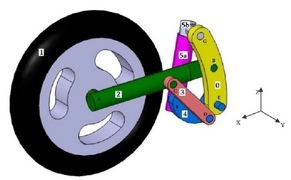 |
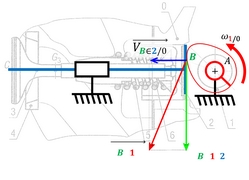
TD3 : Suspension de moto (correction) L’objectif de ce TD est de déterminer graphiquement la vitesse d’écrasement d’un amortisseur d’une roue de moto connaissant la vitesse d’un choc. (Prérequis : CH3 à CH7) |
 |
TDBAC1 : Nacelle gyrostabilisée pour multicoptère (2014) (correction) La nacelle gyrostabilisée étudiée est embarquée dans un multicoptère. Elle permet de répondre au besoin de nombreuses applications appartenant à des domaines très variés, telle que la prise de vue aérienne. Dans ce TD, on souhaite analyser le besoin à l’origine du projet et définir quelques fonctions remplies par la nacelle. (Prérequis : CH1) |
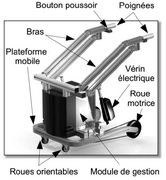 |
TDBAC2 : Robuwalker (2016) (correction) Le soutien aux tâches d’assistance des personnes âgées ou déficientes motrices est un enjeu de société majeur pour les décennies à venir. Le Robuwalker est un prototype de déambulateur conçu pour assister l’utilisateur pendant son déplacement. L’objectif de ce TD est d’analyser la désynchronisation du mouvement des poignées lors d’une transition assis-debout et de conclure sur le choix des vérins utilisés relativement au cahier des charges. (Prérequis : CH1) |
|
TDBAC3 : Transport par boucle urbaine (2024) (correction) Urbanloop est un nouveau concept de déplacement en milieu urbain actuellement (Prérequis : CH1) |
 |
TDCG : Cabine de simulateur de vol (2015) (correction) La formation initiale et le maintien des compétences des pilotes privés ou professionnels se fait au travers de formations comprenant des cours théoriques et des heures de vol. Les simulateurs d’entraînement au vol doivent être homologués selon des conditions techniques définies par arrêté du ministre chargé de l’aviation civile. L’objectif de ce TD est de valider certains éléments de certification du simulateur de vol. (Prérequis : CH1) |
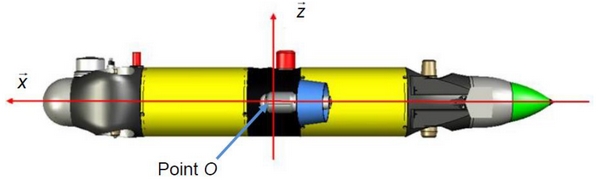 |
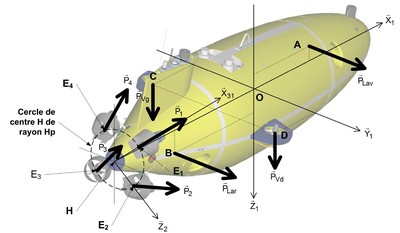
TDBAC4 : Vidéosurveillance de parc hydrolien (2013) (correction) Le parc expérimental hydrolien du site Paimpol-Bréhat a pour objectif de fournir l’énergie électrique nécessaire à 2000 foyers. Un engin sous-marin permet de surveiller le parc. L’objectif est ici d’analyser le torseur des actions mécaniques permettant de modéliser l’action du fluide sur l’engin. (Prérequis : CH1 et CH2) |
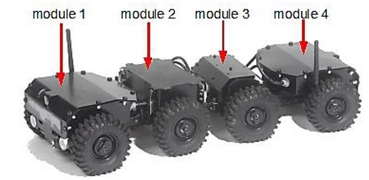 |
TDBAC5 : Robot tout terrain (2016) (correction) Le robot étudié permet d’explorer les conduites dans les bâtiments en vérifiant notamment le niveau d’empoussièrement. Afin de construire un modèle multiphysiques du système, on se propose dans ce TD d’étudier l’équilibre ot sur un plan incliné. (Prérequis : CH1 et CH2) |
 |
TDBAC6 : Système tangible déployable et reconfigurable actif (2017) (correction) L’objectif d’Airbus est de placer virtuellement ses opérateurs dans un avion en situation de montage, réglage, démontage, dans des postures et des conditions d’immersion reproduisant des situations réelles. La collaboration entre Airbus Group SAS, l’Institut de Recherche Technologique Jules Verne et le CNRS sur un projet de Plateau d’Intégration Virtuelle Produit/Process (PIVIPP) a permis de créer en 2016 un « système tangible déployable et reconfigurable actif ». L’objectif de ce TD est de valider les solutions techniques qui permettent de commander la position de la table. (Prérequis : CH1 et CH2) |
 |
TDBAC7 : Aspirateur SCOOBA 385 (2013) (correction) L’entreprise IRobot à l’origine du système étudié ici. Le robot domestique nettoyeur de sol Scooba 385 doit remplir les mêmes fonctions de service que sa version industrielle. L’objectif du TD est de valider la solution retenue pour le déplacement du robot scooba, tout en respectant les contraintes d’encombrement de la motorisation. (Prérequis : CH3) |
 |
TDBAC8 : Simulateur de pente (2022) (correction) Lors du premier confinement lié à la pandémie de la covid-19, les sportifs, amateurs comme professionnels, ont dû adapter leurs pratiques afin d’entretenir leur condition physique. Assez naturellement, les cyclistes ont remplacé leurs sorties d’entrainement sur route par des séances de home-trainer qui consistent à réaliser des exercices spécifiques sur son propre vélo en étant stationnaire. (Prérequis : CH3) |
 |
TDBAC9 : Robot horticole (2023) (correction) Le robot horticole Trooper est un robot autonome chargé de transporter des pots de fleurs. Il s’acquitte des tâches répétitives et pénibles de (Prérequis : CH3) |
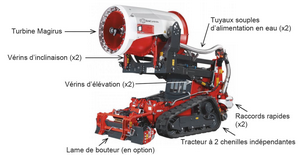 |
TDBAC10 : Robot anti-incendie (2023) (correction) La société EmiControls produit un robot anti-incendie dénommé Turbine Aided Firefighting (TAF35). Il est contrôlé à distance par un opérateur à l’aide d’un pupitre de commande. Le TAF35 est constitué d’une turbine Magirus portée par un tracteur à chenilles. La turbine de projection de l’eau est contrôlée par deux chaînes de puissance : une chaîne dite « d’élévation » et une chaîne dite « d’inclinaison ». (Prérequis : CH3) |
|
TDBAC11 : Aspirateur SCOOBA 385 (2013) (correction) L’entreprise IRobot à l’origine du système étudié ici. Le robot domestique nettoyeur de sol Scooba 385 doit remplir les mêmes fonctions de service que sa version industrielle. Le TD porte sur l’étude du déplacement du robot en translation. (Prérequis : CH3 et CH4) |
 |
TDBAC12 : X-Track (2014) (correction) La retransmission d’événements sportifs est un enjeu majeur pour les différentes chaînes de télévision. La retransmission doit être de qualité et pour apporter plus de dynamisme, la société XD-motion utilise pour filmer l’épreuve d’athlétisme du 100m, le système X-Track qui est une caméra motorisée sur rails. Ce TD a pour objectif d’analyser le besoin et de vérifier les performances du X-Track sur le suivi d’une course. (Prérequis : CH3 et CH4) |
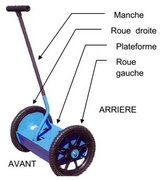 |
TDBAC13 : Gyropode (2013) (correction) L’objet de cette étude est le gyropode « ElektorWheelie » produit par la société ELEKTOR. L’objectif du TD est de vérifier les critères de non-dérapage et de non-basculement énoncés dans la fonction contrainte “rester manœuvrable dans la circulation”. (Prérequis : CH3 à CH6) |
 |
TDBAC14 : Système d’essuie-glace de la renault scenic II (2008) (correction) Un dispositif d’essuie-glace est formé d’un moteur électrique entraînant un montage de type bielle/manivelle. Ce dernier assure la transformation du mouvement rotatif du moteur électrique en mouvement alternatif pour les balais. Avec un pare-brise d’une surface de 1,40 m², le véhicule SCENIC II dégage une vision panoramique remarquable et adopte un dispositif d’essuyage à mouvement parallèle doté d’une cinématique dite “à extension”. L’objectif de ce TD est de vérifier que les fréquences de balayage répondent aux contraintes fixées par la norme européenne en vigueur. (Prérequis : CH3 à CH7) |
 |
TP1 : Barrière Sympact (correction) L’accès à un hangar à bateaux est actuellement géré par une barrière Sympact avec une lisse de 2.5m. Pour pouvoir autoriser l’accès à des bateaux plus larges, le propriétaire de ce hangar souhaite installer une barrière avec une lisse de 3m. Vous devez mener une étude de simulation permettant de vérifier que la vitesse en bout de lisse reste conforme au cahier des charges avec la lisse de 3 mètres. |
| Séquence n°6 : Analyser et modéliser la cinématique des systèmes | ||||||
| Compétences | Compétences développées | Connaissances associées | Modalités pédagogiques | |||
| TP | Cours | EXOS/TD | TDBAC | |||
| Modéliser | Modéliser sous une forme graphique une structure, un mécanisme ou un circuit | Schéma cinématique Graphe de liaisons et des actions mécaniques |
TP1 | CH1 | EX1 | |
| Modéliser les mouvements Modéliser les actions mécaniques |
Trajectoires et mouvement Liaisons Torseurs cinématiques et d’actions mécaniques transmissibles, de contact ou à distance Réciprocité mouvement relatif/actions mécaniques associées |
TP1 | CH2,3,4,5,6 | EX2,3,4,5,6 | TDBAC4,5,6,7 | |
| Déterminer les grandeurs géométriques et cinématiques d’un mécanisme | Positions, vitesses et accélérations linéaire et angulaire sous forme vectorielle Champ des vitesses Composition des vitesses dans le cas d’une chaîne ouverte Loi d’entrée/sortie d’un mécanisme dans le cas d’une chaîne fermée (fermeture géométrique) |
TP1 | CH2,3,4,5,6,7 | EX2,3,4,5,6,7 | TDBAC11,12,13,14 | |
|
|