
Première SI : Séquence 4
Les structures, les enveloppes, les ouvrages et les systèmes mécaniquesL’action mécanique est un concept utilisé en mécanique appliquée pour décrire tous les phénomènes provoquant un mouvement ou une déformation. Ce concept regroupe les notions de force et de couple utilisées en mécanique générale.
Pour représenter les actions mécaniques, on utilise souvent un torseur d’actions mécaniques. Une action mécanique est perceptible par son effet statique ou dynamique.
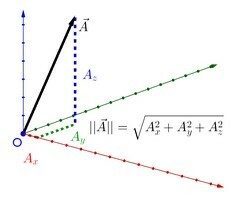 |
CH1 : Rappels sur les vecteurs (version professeur) -[synthèse]
|
 |
CH2 : Forces et actions mécaniques (version professeur) – [synthèse]
|
 |
CH3 : Moments et couples (version professeur) – [synthèse]
|
 |
CH4 : Statique dans le plan et l’espace (version professeur) – [synthèse]
|
 |
TD1 : Rendement d’un vérin simple effet (correction) Nous commencerons par faire une analyse des forces exercées dans un vérin simple effet par le fluide et le ressort de rappel. Ces résultats nous permettront, à partir de la documentation technique du vérin, d’estimer les pertes internes dans le vérin et d’estimer son rendement. (Prérequis : CH1 et CH2) |
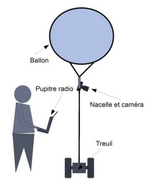 |
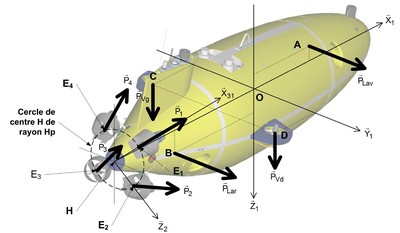
TDBAC1 : Thermographie aérienne (2013) (correction) On étudie ici le principe de thermographie aérienne d’une station de ski par ballon captif. On souhaite analyser les écarts entre la traction attendue du ballon utilisé et les résultats obtenus avec un modèle de calcul en altitude. (Prérequis : CH1 et CH2) |
 |
TDBAC2 : Piste de ski intérieure (2008) (correction) Le snowhall est une installation qui permet la pratique des sports de glisse sur neige artificielle, en intérieur et toute l’année. Le téléski est entraîné par un moteur asynchrone triphasé. On souhaite dans ce TD vérifier que cette solution est correctement validée au regard du cahier des charges sur la capacité maximale du nombre de skieurs à remonter. (Prérequis : CH1 et CH2) |
 |
TDBAC3 : Tri’ode (2016) (correction) Le Tri’ode est un véhicule électrique à trois roues. Il combine une architecture longitudinale issue des véhicules à deux roues et une architecture transversale de voiture au niveau du train avant. L’objectif de ce TD est de justifier l’intérêt d’un dispositif permettant de bloquer la géométrie du train avant, et de vérifier la réactivité du système de blocage de l’architecture transversale. (Prérequis : CH1 et CH2) |
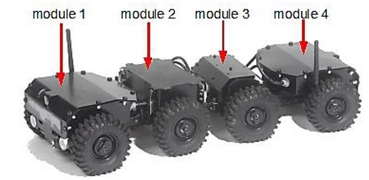 |
TDBAC4 : Robot de surveillance tout-terrain (2016) (correction) Le robot étudié permet d’explorer les conduites dans les bâtiments en vérifiant notamment le niveau d’empoussièrement. On souhaite ici élaborer partiellement un modèle multi-physique prenant en compte les actions mécaniques exercées sur le robot. (Prérequis : CH1 à CH4) |
 |
TDBAC5 : Béquille de moto (2003) (correction) Une moto en stationnement peut être maintenue verticalement en équilibre grâce à une béquille centrale mécanique. Le dispositif étudié ici est un kit de béquillage électrique. L’objectif du TD est de déterminer la valeur du couple en sortie du réducteur nécessaire pour réaliser le béquillage de la moto. (Prérequis : CH1 à CH4) |
 |
TDBAC6 : Nacelle gyrostabilisée pour prise de vue aérienne par multicoptère (2014) (correction) La nacelle gyrostabilisée étudiée est embarquée dans un multicoptère. Elle permet de répondre au besoin de nombreuses applications appartenant à des domaines très variés, telle que la prise de vue aérienne. Dans ce TD, nous allons étudier le comportement de la nacelle lors d’un mouvement de tangage du plateau supportant l’appareil de prise de vue. L’objectif est de vérifier que le moteur actionnant le plateau est correctement dimensionné. (Prérequis : CH1 à CH4) |
 |
TP1 : Robot Youpi (correction) Au bout du bras motorisé est montée une pince permettant de saisir des objets de dimensions diverses. On souhaite vérifier à l’aide d’une simulation que le moteur qui permet le serrage de la pince est correctement dimensionné au regard des caractéristiques mécaniques (dimensions, masse) des objets à saisir. |
 |
TP2 : Porte d’ascenseur (correction) Le système étudié permet d’ouvrir et de fermer les portes d’une cabine d’ascenseur. Le mouvement de rotation du moteur électrique est transformé, par l’intermédiaire du système bielle – manivelle (ou bielle – vilebrequin), en mouvement de translation de la porte. Dans ce TP nous allons analyser l’effort transmis à la bielle par le vilebrequin à l’aide d’un modèle numérique sous Solidworks. |
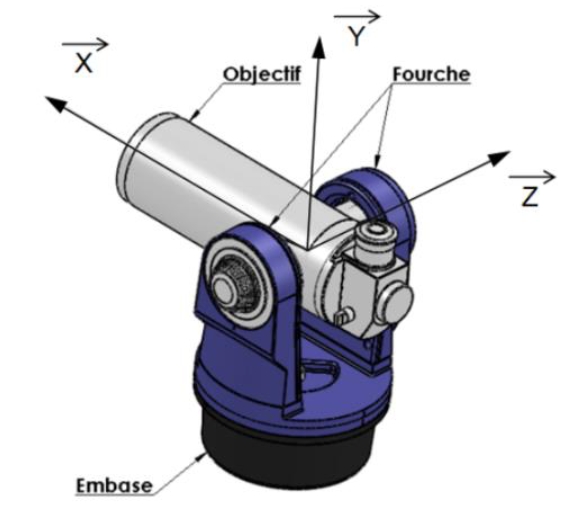 |
TP3 : Astrolab – Etude du couple de basculement (correction) Le télescope motorisé SET assure de manière automatique le pointage et le suivi d’un objet céleste. Lors de la phase de suivi en monture azimutale, il doit contrôler suffisamment précisément les vitesses de ses deux moteurs afin de conserver l’objet céleste dans le champ d’observation. Ce TP porte sur l’étude du couple de basculement du télescope. Nous comparerons les résultats obtenus avec un modèle de simulation sous SolidWorks et les résultats obtenus expérimentalement. |
| Séquence n°4 : Les structures, les enveloppes, les ouvrages et les systèmes mécaniques | ||||||
| Compétences | Compétences développées | Connaissances associées | Modalités pédagogiques | |||
| TP | Cours | EXOS/TD | TDBAC | |||
| Analyser | Analyser la réversibilité d’un élément de la chaîne de puissance | Réversibilité/irréversibilité des constituants d’une chaîne de puissance | TP3 | |||
| Analyser les charges appliquées à un ouvrage ou une structure | Charge permanente, charge d’exploitation | TP1,2,3 | CH1,2,3 | EX1,2,3 TD1 | TDBAC1,2,3 | |
| Modéliser | Proposer et justifier des hypothèses ou simplification en vue d’une modélisation | Hypothèses simplificatrices Modélisation plane | TP1,2,3 | CH1,2,3 | EX1,2,3 TD1 | TDBAC1,2,3 |
| Déterminer les actions mécaniques (inconnues statiques de liaisons ou action mécanique extérieure) menant à l’équilibre statique d’un mécanisme, d’un ouvrage ou d’une structure | Principe fondamental de la statique | TP1,2,3 | CH4 | EX4,4bis | TDBAC4,5,6 | |
| Quantifier les performances d’un objet réel ou imaginé en résolvant les équations qui décrivent le fonctionnement théorique | Méthodes de résolution analytique et numérique | CH1,2,3,4 | EX1,2,3 EX4,4bis | |||
|
Expérimenter Simuler
|
Mettre en œuvre une simulation numérique à partir d’un modèle multi-physique pour qualifier et quantifier les performances d’un objet réel ou imaginé | Paramètres de simulation : durée, incrément temporel, choix des grandeurs affichées, échelles adaptées à l’amplitude et la dynamique des grandeurs simulées | TP1,2,3 | |||
| Valider un modèle numérique de l’objet simulé | Écarts entre les performances simulées et mesurées | TP3 | ||||
|
|