
Terminale SI : Séquence 3
Motoriser les moyens de transport et assurer le confort de l’usager
Un des enjeux sociétaux d’aujourd’hui est de rendre universelle l’utilisation de l’électricité dans la motorisation des moyens de transport.
Transporter des biens ou des personnes demande également que l’usager ressente un certain confort : il ne doit pas être soumis aux perturbations extérieures, comme par exemple des secousses lors d’un déplacement en voiture.

 |
CH1 : Eléments de construction (version professeur)
|
 |
CH2 : Généralités sur les moteurs électriques (version professeur)
|
 |
CH3 : Le moteur à courant continu (version professeur)
|
 |
CH4 : Introduction aux asservissements (version professeur)
|
 |
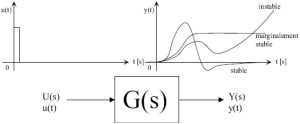
CH5 : Modélisation des processus commandés (version professeur)
|
 |
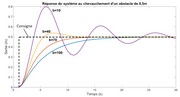
CH6 : Caractéristiques des systèmes asservis (version professeur)
|
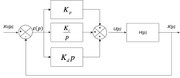 |
CH7 : Correction des systèmes asservis (version professeur)
|
 |
TD1 : Astrolab (correction)
Le télescope motorisé SET assure de manière automatique le pointage et le suivi d’un objet céleste. L’objectif de cette activité est d’étudier la chaine d’énergie (plus particulièrement la transformation de mouvement) qui est utilisée pour déplacer l’objectif par rapport à la fourche. (Prérequis : CH1) |
 |
TD2 : Monte charges (correction)
Les monte-charges sont des appareils assimilables à un ascenseur, mais sont généralement utilisés pour faire monter ou descendre des charges comme leur nom l’indique et ce, sur des niveaux définis. On souhaite déplacer une charge de 40kg à une vitesse de 1 m/s. Connaissant les caractéristiques du moteur et du réducteur, vous devez déterminer les caractéristiques de l’alimentation électrique (tension et intensité). (Prérequis : CH3) |
 |
TD3 : Phares escamotables (correction)
L’étude proposée concerne les phares escamotables de l’Alpine A 610 Turbo. Les phares basculent en position “ouverts” ou “fermés” suivant les informations délivrées par une manette de commande. L’étude portera sur le système de détection du blocage du MCC du phare droit. (Prérequis : CH3) |
 |
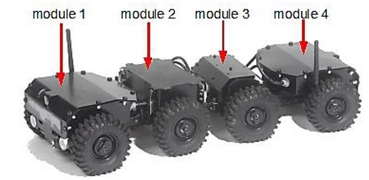
TD4 : Asservissement en vitesse du Robovolc (correction) Le ROBOVOLC est un robot mobile pour l’exploration volcanique. Il est conçu pour minimiser les risques pris par les vulcanologues et les techniciens impliqués dans des activités à proximité des cratères en phase éruptive. L’objectif de ce TD est d’analyser les choix de correcteurs permettant de réaliser un asservissement en vitesse. (Prérequis : CH4 à 7)
|
 |
TDBAC1 : Camper Trolley (2012) (correction)
Le système étudié est le tracteur caravane Camper trolley. L’objectif du TD est de vérifier que le camper trolley est capable de tracter correctement la caravane compte tenu des actions mécaniques mises en jeu. (Prérequis : CH1) |
 |
TDBAC2 : Robot explorateur (2016) (correction)
Le robot étudié permet d’explorer les conduites dans les bâtiments en vérifiant notamment le niveau d’empoussièrement. Dans ce TD, on souhaite élaborer partiellement un modèle multi-physique puis utiliser les résultats de ce modèle pour déterminer l’influence de la masse embarquée ainsi que celle du câble de commande en mode filaire sur l’autonomie. (Prérequis : CH1) |
 |
TDBAC3 : Fauteuil électrique (2005) (correction)
On cherche ici à vérifier que le mécanisme de débrayage permet correctement, par l’intermédiaire du couple fourni par le moteur, de faire avancer le fauteuil électrique compte tenu des actions mécaniques mises en jeu. (Prérequis : CH1) |
 |
TDBAC4 : Machine de conditionnement (2006) (correction)
On étudie ici la motorisation d’une machine de conditionnement à l’aide d’un moteur asynchrone ainsi que le système de protection de l’installation. (Prérequis : CH2) |
 |
CG1 : eSolex (Concours général 2011) (correction)
En 2005, le Solex renaît de ses cendres sous l’impulsion de Jean Pierre Bansard, un chef d’entreprise français. C’est en juin 2004 que sa société « Cible », rachète le nom Solex. Son ambition : ressusciter la marque mythique. Dans ce TD, nous allons évaluer l’impact du remplacement du moteur brushless par un moteur à courant continu à aimants permanents. Nous étudierons ensuite le système de protection de la batterie et du moteur. (Prérequis : CH2) |
 |
CG2 : Hydrocoptère (Concours général 2012) (correction)
Le projet Hydroptère a vu le jour sous la double impulsion d’Eric Tabarly et d’Alain Thébault qui dans les années 80 développent un voilier utilisant des plans porteurs. Un mode de réalisation avantageux de l’Hydroptère consiste à pouvoir régler l’angle du plan porteur arrière pour obtenir l’assiette souhaitée dans le but de favoriser le décollage d’une part et d’optimiser les performances en vol d’autre part. Le but de l’étude est de vérifier le dimensionnement de la chaîne d’énergie du PPAR. (Prérequis : CH3) |
 |
TP1 : Asservissement en vitesse du mini robot PICAXE (correction)
On se propose dans ce TP d’asservir en vitesse le robot PICAXE. Pour cela, nous modéliserons les paramètres des composants de la chaine cinématique sous Matlab / Simulink et mettrons en place un asservissement à l’aide des outils de Simulink. |
| Séquence n°3 : Motoriser les moyens de transport et assurer le confort de l’usager | ||||||
| Compétences | Compétences développées | Connaissances associées | Modalités pédagogiques | |||
| TP | Cours | EXOS/TD | TDBAC | |||
| Analyser |
Caractériser la puissance et l’énergie nécessaire au fonctionnement d’un produit ou d’un système Repérer les échanges d’énergie sur un diagramme structurel |
Grandeurs physiques (mécanique, électrique, thermique, etc.) mobilisées par le fonctionnement d’un produit Grandeurs d’effort et de flux liées à la nature des procédés Rendements et pertes |
CH1,2,3 | TD1,2,3 | ||
| Analyser la réversibilité d’un élément de la chaîne de puissance | Sens des transmissions de puissance Réversibilité/irréversibilité des constituants d’une chaîne de puissance |
TP1 | CH1,2,3 | TD1,2,3 |
|
|
| Analyser le comportement d’un système asservi | Systèmes asservis linéaires en régime permanent : structures par chaîne directe ou bouclée, perturbation, comparateur, correcteur proportionnel, précision (erreur statique) | TP1 | CH4 | EX1 | ||
| Modéliser | Déterminer les actions mécaniques (inconnues statiques de liaisons ou action mécanique extérieure) menant à l’équilibre statique d’un mécanisme, d’un ouvrage ou d’une structure | Principe fondamental de la statique Modèle de frottement – Loi de Coulomb |
|
|||
| Associer un modèle à un système asservi | Notion de système asservi : consigne d’entrée, grandeur de sortie, perturbation, erreur, correcteur proportionnel | TP1 | CH4,6,7 |
|
||
| Utiliser les lois et relations entre les grandeurs effort et flux pour élaborer un modèle de connaissance | Modèle de connaissance sur des systèmes d’ordre 0, 1 ou 2 : gain pur, intégrateur, dérivateur | TP1 | CH5 | |||
|
Expérimenter Simuler |
Instrumenter tout ou partie d’un produit en vue de mesurer les performances | Règle de raccordement des appareils de mesure et des capteurs | TP1 | |||
| Modifier les paramètres influents et le programme de commande en vue d’optimiser les performances du produit | Processus itératif d’amélioration des performances | |||||
| Mettre en œuvre une simulation numérique à partir d’un modèle multi-physique pour qualifier et quantifier les performances d’un objet réel ou imaginé | Paramètres de simulation : durée, incrément temporel, choix des grandeurs affichées, échelles adaptées à l’amplitude et la dynamique des grandeurs simulées | |||||
| Valider un modèle numérique de l’objet simulé | Écarts entre les performances simulées et mesurées Limites de validité d’un modèle |
|||||