
Première SI : Séquence 5
Les échanges et la communication d’informations
Les capteurs sont des composants de prélèvement d’information sur différentes grandeurs physiques de l’environnement.
L’obtention d’une donnée par une chaine d’acquisition nécessite souvent plusieurs opérations, notamment dans le traitement et la restitution du signal.
Les informations traitées peuvent également être transportées de différentes manières (par exemple par ondes radio, sur des câbles de transmission ou encore par fibre optique).
EX1: Exercices sur les potentiels et le fléchage des tensions électriques (correction)
EX2: Exercices sur les lois électriques (correction)
EX3: Exercices sur les signaux numériques (correction)
EX4: Exercices sur le codage des informations numériques (correction)
EX5: Exercices sur la topologie et les constituants réseaux (correction)
 |
CH1 : Acquérir l’information avec les capteurs (version professeur) – [synthèse]
|
 |
CH2 : Traiter l’information analogique (version professeur) – [synthèse]
|
 |
CH3 : Les signaux numériques (version professeur) – [synthèse]
|
 |
CH4 : Codage des informations numériques (version professeur) – [synthèse]
|
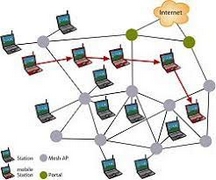 |
CH5 : Topologie et constituants des réseaux (version professeur) – [synthèse]
|
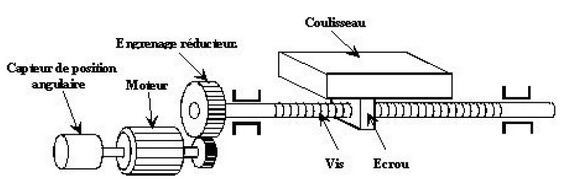 |
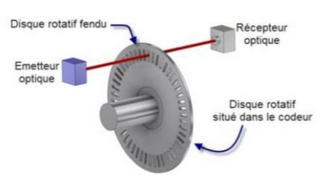
TD1 : Codeurs optiques incrémentaux et absolus – Système vis sans fin (correction) Nous allons étudier l’impact des caractéristiques (nombre de points) d’un codeur incrémental ou absolu sur la précision de positionnement d’un plateau commandé par un système de vis sans fin. (Prérequis : CH1)
|
 |
TD2 : Massicot automatisé (correction) Le système étudié permet de découper des profilés en plastique, d’une longueur de 1,5 mètres. La longueur des profilés est déterminée en comptant les impulsions délivrées par un codeur incrémental, placé sur l’un (Prérequis : CH1)
|
 |
TD3 : Mesure de l’inclinaison du télescope motorisé Astrolab (correction) Le module LNT du télescope fournit trois informations au processeur de la raquette, la position par rapport au nord terrestre, l’inclinaison par rapport à l’horizontale ainsi que l’heure. Ces mesures servent à identifier la position du télescope par rapport au repère céleste afin de pouvoir ensuite pointer les objets célestes à partir de leurs coordonnées mémorisées dans la base de données de la raquette. Le capteur utilisé pour mesurer l’inclinaison est un accéléromètre MXD2020E/F. (Prérequis : CH1)
|
 |
TD4 : Etude d’un bathythermographe (correction) Nous allons étudier dans ce TD comment l’information fournie par un capteur de température à base de thermistance peut être conditionnée pour pouvoir être exploitée. (Prérequis : CH1, CH2)
|
 |
TD5 : Affranchisseur de colis automatique (correction) On s’intéresse dans ce TD à comment déterminer la masse du colis afin de l’affranchir sans erreur de facturation. Le principe utilisé dans l’automate d’affranchissement de colis postal est la mesure d’une masse par déformation d’un corps. Cette déformation est mesurée par une jauge de contrainte puis le signal est traité afin de créer une tension image de la masse du colis. (Prérequis : CH1, CH2)
|
 |
TDBAC1 : Aspirateur SCOOBA 385 (2013) (correction) L’entreprise IRobot à l’origine du système étudié ici. Le robot domestique nettoyeur de sol Scooba 385 doit remplir les mêmes fonctions de service que sa version industrielle. L’objectif du TD est d’analyser les solutions retenues pour les détections de vide et d’obstacles du robot Scooba, puis de déterminer sa vitesse de déplacement optimale. (Prérequis : CH1)
|
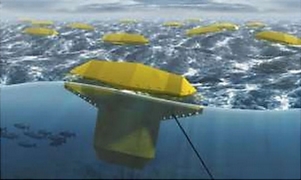 |
TDBAC2 : Ferme marine SEAREV (2014) (correction) On estime que l’on pourrait installer en mer des parcs de machines avec une densité de puissance de l’ordre de 25 MW par km2 de mer occupée, ce qui pourrait alimenter environ 8 000 foyers français en électricité (moyenne annuelle hors chauffage). Le SEAREV grandeur réelle (24 m sur 14 m, 1 000 tonnes dont 400 tonnes pour la roue pendulaire) devrait avoir une puissance électrique installée de 500 kW. L’objectif de ce TD est d’analyser la solution retenue pour augmenter la puissance électrique produite par le SEAREV, et compléter l’organigramme de la gestion du frein. (Prérequis : CH1)
|
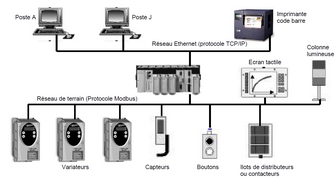 |
TDBAC3 : Conditionneuse en milieu alimentaire (2006) (correction) L’étude portera sur le conditionnement sous film plastique de qualité alimentaire de l’ensemble de barquettes appelé « tube ». L’objectif de ce TD est d’analyser l’organisation du réseau gérant la commande du système de conditionnement. Le contrôle est réalisé à l’aide d’un analyseur de trame MODBUS. (Prérequis : CH1 à CH5) |
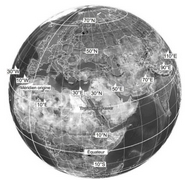 |
TDBAC4 : Thermographie aérienne (2013) (correction) On étudie ici le principe de thermographie aérienne d’une station de ski par ballon captif. En montagne, il est plus difficile d’identifier précisément les lieux de prises de vues que dans une ville, dans laquelle chaque rue porte un nom et chaque bâtiment un numéro. Un point GPS est donc nécessairement associé à chaque prise de vue. L’objectif du TD est de proposer une solution au décodage de la trame au format texte du GPS pour en extraire la position géographique de la prise de vue. (Prérequis : CH1 à CH5) |
 |
TDBAC5 : Vidéosurveillance de parc hydrolien (2013) (correction) Le parc expérimental hydrolien du site Paimpol-Bréhat a pour objectif de fournir l’énergie électrique nécessaire à 2000 foyers. Un engin sous-marin permet de surveiller le parc. On étudie ici le contrôle du positionnement de l’engin qui est réalisé à l’aide d’une centrale inertielle de type XSENS MTx-28 A53 G25 à technologie MEMS (Micro Electro-Mechanical Systems). L’objectif du TD est d’analyser les contraintes de transmission de la position de l’engin sous-marin et du stockage de l’information vidéo. Il s’agit également de vérifier la cohérence des techniques utilisées lors de la mission d’inspection. (Prérequis : CH1 à CH5) |
|
TDBAC6 : SEAREV (2014) (correction) On estime que l’on pourrait installer en mer des parcs de machines avec une densité de puissance de l’ordre de 25 MW par km2 de mer occupée, ce qui pourrait alimenter environ 8 000 foyers français en électricité (moyenne annuelle hors chauffage). Le SEAREV grandeur réelle (24 m sur 14 m, 1 000 tonnes dont 400 tonnes pour la roue pendulaire) devrait avoir une puissance électrique installée de 500 kW. L’objectif du TD est d’analyser la solution proposée afin que tous les SEAREV d’une ferme marine communiquent à la base terrestre en temps réel la hauteur et la période des vagues. (Prérequis : CH1 à CH5) |
 |
TDBAC7 : Manequin de choc (2015) (correction)
Une directive européenne (2003/102/EC) oblige les fabricants de voitures à assurer la protection des piétons en adaptant les éléments de sécurité. Pour vérifier l’efficacité de ces dispositifs, elle impose des tests de choc utilisant un impacteur mécanique représentant la jambe d’un piéton. L’objectif de ce TD est de déterminer la valeur du gain à attribuer aux signaux issus de l’accéléromètre utilisé pour évaluer le risque de fracture du tibia. (Prérequis : CH1 à CH5) |
 |
TP1 : Attacheur de végétation Fixion AP-25 (correction) Ce TP d’étude de la chaîne d’information de l’attacheur AP25 vise à analyser la solution constructive de détection sans contact de la position du torsadeur, valider le choix du capteur et mesurer puis valider les caractéristiques de sortie de la chaîne d’acquisition. Le capteur utilisé est un capteur à effet hall. |
 |
TP2 : Inclinomètre de l’Astrolab (correction) Le module LNT de l’Astrolab fournit trois informations au processeur de la raquette : la position par rapport au nord terrestre, l’inclinaison par rapport à l’horizontale et l’heure du lieu d’observation. Ce TP d’étude de la chaîne d’information de l’Astrolab vise à effectuer le relevé des signaux issus du capteur permettant de connaître la vitesse et la position du tube optique, analyser ces signaux et vérifier que leurs caractéristiques permettent d’obtenir les informations recherchées. Le capteur utilisé est un accéléromètre. |
 |
La société HEMOPHARM, spécialisée dans la commercialisation d’appareils médicaux, a développé un automate de prélèvement automatique de sang. Cet automate permet de prélever le sang, et s’arrête dès que le poids (volume) désiré est atteint. L’objectif de ce TP est de vérifier que le capteur mis en place (jauge de déformation) répond au cahier des charges. Un modèle de simulation sera ensuite validé en fonction des résultats expérimentaux obtenus. |
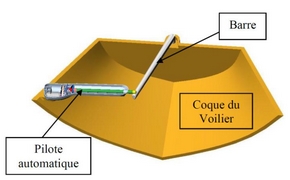 |
TP4 : Pilote automatique (correction) Nous allons nous intéresser à la manière dont est commandé le moteur pour corriger un écart de cap. Les agents externes tels que le vent et la houle (éléments perturbateurs) font que le pilote automatique doit corriger en permanence le cap suivi par le voilier minimisant ainsi leur influence (modification du cap à suivre). Le système de traitement de l’information doit donc agir sur la barre pour rester fidèle au cap réglé par le navigateur. Ici, le capteur utilisé est un capteur à effet Hall. |
 |
TP5 : Robot haptique (correction) L’haptique désigne la science du toucher, par analogie avec l’acoustique ou l’optique. La restitution de sensations artificielles nécessite d’utiliser un dispositif, dit « à retour d’effort », générant des forces dont l’amplitude et la fréquence reproduisent les sensations réelles. L’objectif de ce TP est de vérifier que les capteurs utilisés (codeurs optiques) permettent de connaître la vitesse et la position des moteurs, et de mesurer les éventuels écarts avec les valeurs attendues. |
Station météo embarquée dans le Jetson Nano de Nvidia
 |
Le challenge de 12h sur lequel nous travaillerons nécessitera d’utiliser le kit Jetson Nano de nvidia. Cette carte de développement est spécialement conçue pour mettre en œuvre de l’intelligence artificielle. L’objectif du projet est d’utiliser la carte Jetson Nano afin de réaliser une station météo embarquée. Cela va nous permettre d’acquérir les connaissances nécessaires sur l’utilisation du kit afin de mener à bien le challenge de 12h. |
Le kit Jetson Nano embarque un système d’exploitation de type linux. Nous allons donc devoir dans un premier temps apprendre à installer et à configurer le système d’exploitation sur cette carte. Plus exactement, le module prend en charge le kit de développement JetPack qui intègre les bibliothèques d’accélération Nvidia Cuda-X ainsi qu’une pile IA complète avec bibliothèques pour l’apprentissage machine, la vision artificielle, les calculs graphiques et le traitement multimédia. JetPack dispose en outre d’un système d’exploitation Linux et des dernières versions en date des logiciels Cuda, cuDNN et TensorRT.

Pour créer notre station météo, il faut que nous apprenions à programmer les ports d’entrées – sorties et de communication (GPIO) du kit Jetson Nano. En particulier, nous devons pouvoir communiquer avec des capteurs afin de mesurer la température et l’humidité.
Le capteur que nous allons utiliser est un module de référence PCF8591 qui intègre une thermistance, une photorésistance ainsi qu’une puce électronique permettant de transmettre les informations sur le bus I2C. La programmation se fera en langage Python.
| Séquence n°5 : Les échanges et la communication d’informations | ||||||
| Compétences | Compétences développées | Connaissances associées | Modalités pédagogiques | |||
| TP | Cours | EXOS/TD | TDBAC | |||
| Analyser | Analyser le traitement de l’information | Algorithme, programme Langage informatique |
Projet | TDBAC2 | ||
| Analyser les principaux protocoles pour un réseau de communication et les supports matériels | Protocoles, trames, encapsulation Support filaire et sans fil |
Projet | CH3,4,5 | EX3,5 | TDBAC3,4,5,6,7 | |
| Analyser les principes de modulation et démodulation numériques | Notions de modulation-démodulation de signaux numériques en amplitude, en fréquence | CH3 | EX3 | |||
| Analyser les principaux protocoles pour un réseau de communication et les supports matériels | Protocoles, trames, encapsulation Support filaire et sans fil |
Projet | CH3,4,5 | EX3,4,5 | TDBAC3,4,5,6,7 | |
| Quantifier les écarts de performances entre les valeurs attendues, les valeurs mesurées et les valeurs obtenues par simulation | Écarts de performance absolu ou relatif, et interprétations possibles Erreurs et précision des mesures expérimentales ou simulées |
TP1,2,3,4,5 | ||||
| Modéliser | Traduire le comportement attendu ou observé d’un objet | Comportement séquentiel Structures algorithmiques (variables, fonctions, structures séquentielles, itératives, répétitives, conditionnelles) |
Projet | TDBAC2 | ||
| Modéliser sous une forme graphique une structure, un mécanisme ou un circuit | Circuit électrique | CH2 | TD4,5 | |||
| Caractériser les échanges d’informations | Natures et caractéristiques des signaux, des données, des supports de communication Protocole, trame Débit maximal, débit utile |
TD1,3,4,5 | TDBAC3,4,5,6,7 | |||
| Associer un modèle à un système asservi | Capteurs | CH1 | TD1,2,3,4,5 | TDBAC1,2,3,4,5,6,7 | ||
| Déterminer les grandeurs flux (courant) et effort (tension) dans un circuit électrique | Lois de Kirchhoff Lois de comportement |
CH2 | ||||
|
Expérimenter Simuler |
Conduire des essais en toute sécurité à partir d’un protocole expérimental fourni | Règle de raccordement des appareils de mesure et des capteurs | ||||
| Instrumenter tout ou partie d’un produit en vue de mesurer les performances | Capteurs, composants d’une chaîne d’acquisition Paramétrage d’une chaîne d’acquisition Carte micro – contrôleur |
|||||
| Relever les grandeurs caractéristiques d’un protocole de communication | Caractéristiques des signaux Protocole, trame Débit maximal, débit utile |
|||||
| Mettre en œuvre une simulation numérique à partir d’un modèle multi-physique pour qualifier et quantifier les performances d’un objet réel ou imaginé | Paramètres de simulation : durée, incrément temporel, choix des grandeurs affichées, échelles adaptées à l’amplitude et la dynamique des grandeurs simulées | TP2,3,4,5 | ||||
| Valider un modèle numérique de l’objet simulé | Écarts entre les performances simulées et mesurées Limites de validité d’un modèle |
|||||
| Communiquer | Présenter un protocole, une démarche, une solution en réponse à un besoin Présenter et formaliser une idée | Diagrammes fonctionnels, schémas, croquis |
(oraux) |
|||
| Rendre compte de résultats | Tableau, graphique, diaporama, carte mentale | |||||
| Collecter et extraire des données Comparer, traiter, organiser et synthétiser les informations pertinentes | ENT, moteurs de recherche, internet, blog, base de données, dossiers techniques | |||||
| Travailler de manière collaborative Trouver un tiers expert Collaborer en direct ou sur une plateforme, via un espace de fichiers partagés | Espaces partagés et de stockage, ENT | |||||
| Adapter sa communication au public visé et sélectionner les informations à transmettre Scénariser un document suivant le public visé | Média, outils multimédia, outils bureautiques, carte mentale, diagramme de l’ingénierie système, schéma, croquis, prototype | |||||
| Communiquer de façon convaincante | Placement de la voix, qualité de l’expression, gestion du temps | |||||
|
|